光柵的安裝與安全距離
安裝安全光柵或其他電氣檢測防護裝置時,請參閱人體進入檢測區後,在到達危險區之前讓機器停止所需的最小距離。如 ISO 13855 等標準中定義了這些距離。安裝光柵時,請確定提供光柵使用所在國家或區域的標準、規定及法律等來源所決定的安全距離(最短距離)。
根據 ISO 13855 計算安全距離
安全距離(S)= 人體接近速度 × 回應時間 + 額外距離(此距離隨感測器的極限檢測能力而不同)
與接近方向垂直的方向
機械停止所需最長時間與安全距離之間的關係
將下列兩個參數相加即可得公式中的 T 值。
T = 機械停止的最長時間 + 光柵回應時間(開 關閉)
當 K(穿越速度)= 2000 mm/s 時
例如,使用 GL-R08H 光柵時(回應時間為 0.0069 s)
S = 2000 mm/s ×(機械停止所需最長時間 + 0.0069 s)+ C
如上述,機器停止所需的最長時間乘以穿越速度(2000 mm/s),因此即使機器停止所需的最長時間只增加 1 秒,安全距離也會增加(2000 mm/s × 1 s = 2000 mm)。光柵回應時間每增加 1 ms,安全距離會增加 2 mm。
基本演算範例
與接近方向垂直的方向:GL-R 系列
- 演算範例 (1)-1
使用 GL-R60H 時
(極限檢測能力 d = 25 mm 且光軸數為 60)
- 條件:工業應用
K = 2000 mm/s
t1 (GL-R60H 回應時間) = 0.0157s
t2 (機械停止所需的最長時間) = 0.1s
C = 8 × (25 - 14) = 88 mm
S = K × T + C = 2000 ×(0.1157)+ 88 = 319.4mm
如果 S 大於或等於 500 mm,請以 K 等於 1600 mm/s 重新演算一次。如果新計算的結果使 S 小於或等於 500,請將 S 設為 500。
- 演算範例 (1)-2
使用 GL-R08L 時
(極限檢測能力 d = 45 mm 且光軸數為 8)
- 條件:工業應用
K = 1600 mm/s
t1 (GL-R08L 回應時間) = 0.0069 s
t2 (機械停止所需的最長時間) = 0.1 s
C = 850 mm
S = K × T + C = 1600 × (0.1069) + 850 = 1021.04 mm
與接近方向平行的方向:GL-R 系列
- 演算範例 (2)-1
使用 GL-R30L 時
(極限檢測能力 d = 45 mm 且光軸數為 30)
- 條件:工業應用
K = 1600 mm/s
t1 (GL-R30L 回應時間) = 0.0105 s
t2(機械停止所需的最長時間) = 0.1 s
H = 200 mm
C = 1200 - 0.4 × 200 = 1120 mm
S = K × T + C = 1600 × (0.0105 + 0.1) + 1120 mm = 1296.8 mm
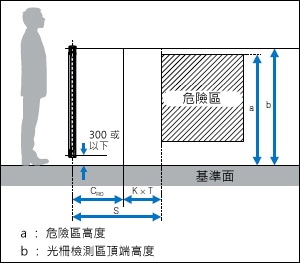
繞過檢測區域頂端而接近危險:GL-R 系列
當無法防止人們穿越檢測區頂端而接近危險區時,則決定光柵高度和最短距離 S 時必須要考慮此問題。您必須將根據如下所述算出的 S 值 與根據「與接近方向垂直的方向:GL-R 系列」算出的 S 值進行比較, 並將兩者之中較大的值設為最短距離 S。
根據 a 值(危險區高度)和 b 值(光柵檢測區頂端高度)決定 CRO,如下表所示。

*1 不包括檢測區頂端小於 900 mm 的狀況,因為在這種狀況下無法有充分的防護能力來防禦規避和跨越行為。
*2 如果檢測區底端距離基準面的高度超過 300 mm,則無法提供充分的防護能力來防止人員從檢測區域下方通過而接近危險。
- 演算範例 (3)-1
使用 GL-R60H 時
(極限檢測能力 d = 25 mm,光軸數為 60,檢測高度為 1180 mm)
- 條件:工業應用
a (危險區高度) = 1400 mm
b (光柵檢測區頂端高度) = 1180 + 300 = 1480 mm

- 根據上表,CRO 為 850 mm。
(由於 1480 mm,所以介面 1400 到 1600 之間,在此狀況下使用 b 值為 1400。)
- K = 1600 mm
- t1(GL-R60H 回應時間)= 0.0157 s
- t2(機械停止所需的最長時間)= 0.1 s
- S = K × T + CRO = 1600 × (0.1157) + 850 = 1035.12 mm
(這大於依照「接近方向垂直的方向:GL-R 系列」算出的 S 值。)
- 演算範例 (3)-2
使用 GL-R80H 時
(極限檢測能力 d = 25 mm,光軸數為 80,檢測高度為 1580 mm)
- 條件:工業應用
a (危險區高度) = 1400 mm
b (光柵檢測區頂端高度) = 1580 + 300 = 1880 mm

- 根據上表,CRO 為 0 mm。
(由於 1880 mm,所以介面 1800 到 2000 之間,在此狀況下使用 b 值為 1800。)
- K = 2000 mm/s
- t1 (GL-R80H 回應時間)= 0.0192 s
- t2(機械停止所需的最長時間)= 0.1 s
- S = K × T + CRO = 2000 × (0.1192) + 0 = 238.4 mm
(這小於依照「與接近方向垂直的方向:GL-R 系列」算出的 S 值。)