
2D機械手臂視覺
2D VGR 系列
2D機械手臂視覺 2D VGR 系列
全新 機械手臂視覺的穩定運轉
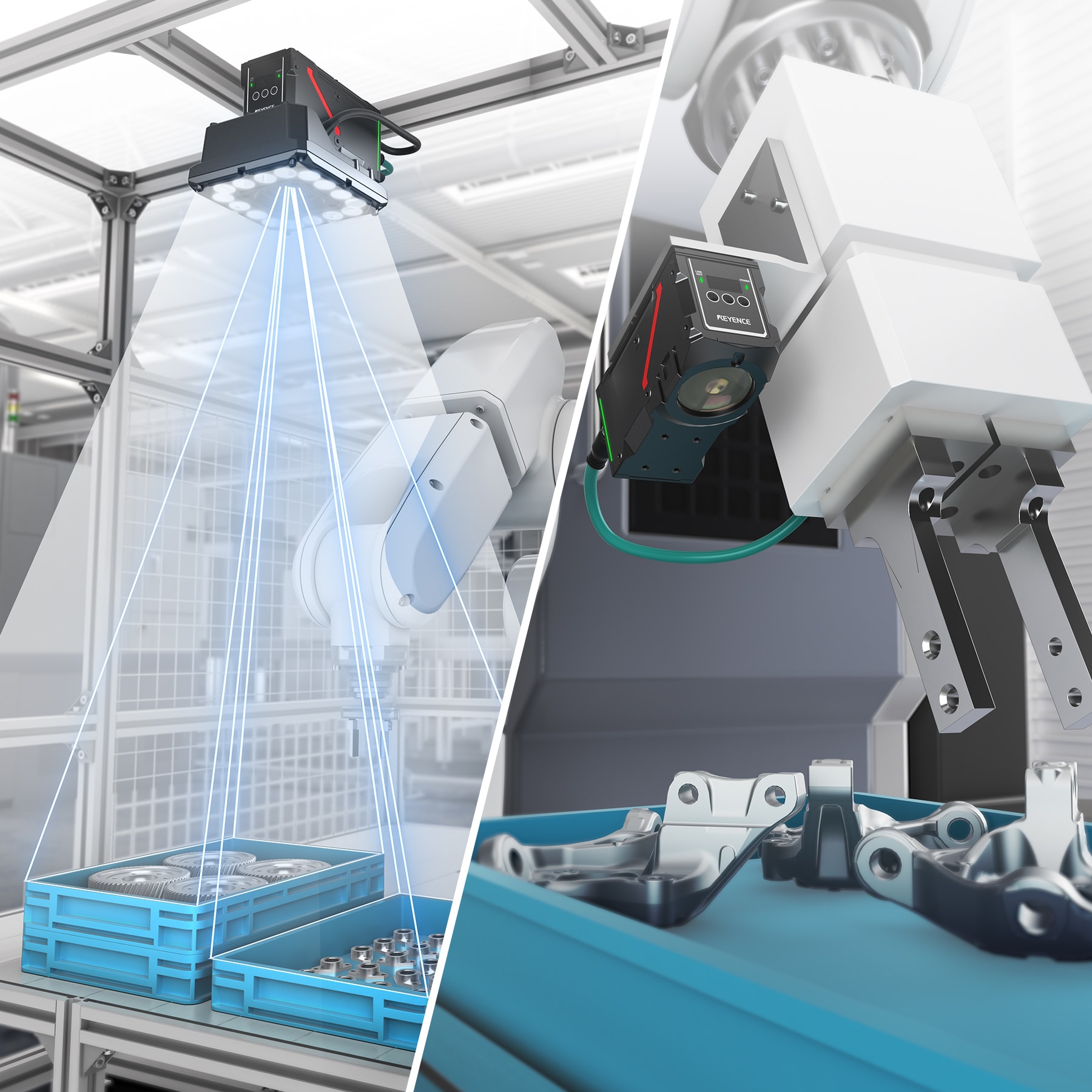
透過機械手臂視覺可實現最佳成像。
- 在大視野下進行明亮均勻地拍攝
- 支援多層棧板及製程切換
- 最適合機械手臂CAMERA的硬體
KEYENCE的2D機械手臂視覺,具備從只需選擇機械手臂廠商的簡單連接,到機械手臂視覺專用的介面、自動校正,以及強大的搜尋工具,堪稱2D機械手臂視覺的全球標準設備。選擇目標圖示的介面,除了標準的抓取、放置、抓取偏移補正外,還支援多種動作,設定大幅簡化。此外,擁有出色的機械手臂連接性和相容性,只需選擇機械手臂廠商名稱即可與各品牌的標準控制器連接。另外,只需選擇移動模式並按下[執行],即可自動完成校正。此外,採用ShapeTrax™3搜尋工具,以提供出色的應對能力與穩定運用。透過新開發的自動特徵抽取演算法,實現高精度的機械手臂視覺系統。
產品特性
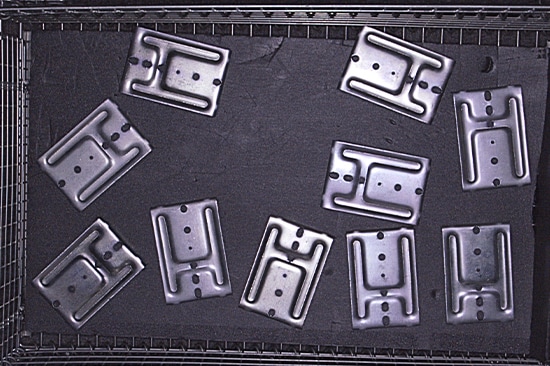
在大視野下進行明亮均勻地拍攝
在大視野下,畫面中央及邊緣容易產生亮度差異的顏色不均。
透過高亮度智慧環的OverDrive亮燈及HDR等拍攝技術,在大視野下亦可進行均勻拍攝。
Before
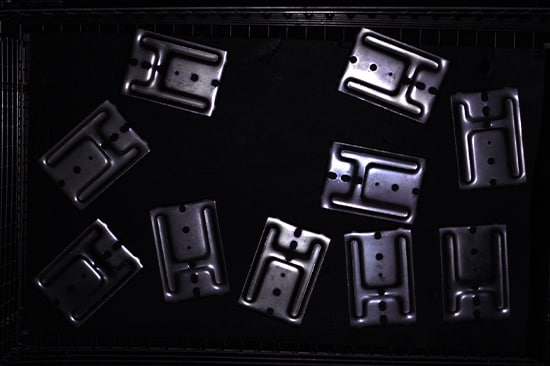
After
支援多層棧板及製程切換
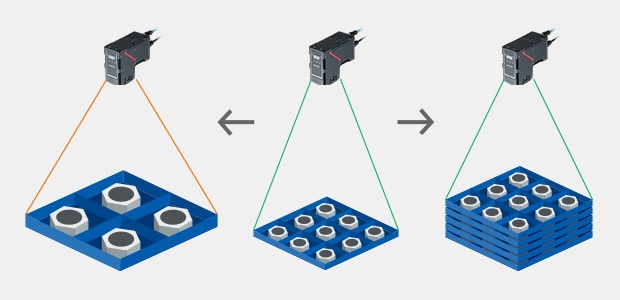
使用ZoomTrax,透過視野變更功能,支援工件尺寸變更。自動對焦功能也能夠支援棧板的高度差異。不改變鏡頭就能支援各種生產設備。
最適合機械手臂CAMERA的硬體
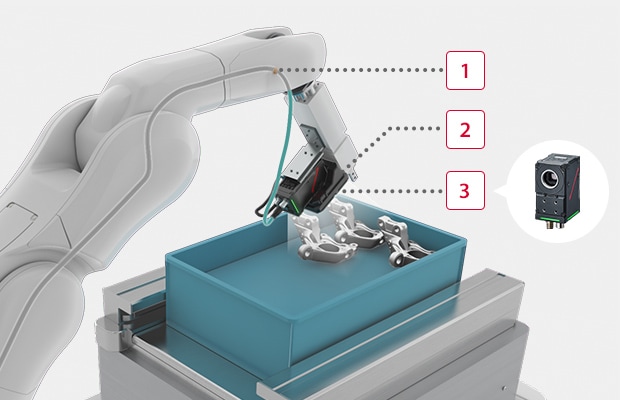
運用PoE連接的機台內部配線、IP67的耐環境性能、C-mount型的輕量化,支援範圍亦可擴展到機械手臂CAMERA應用。
-
1可以連接機台內部配線,因此纜線不易斷裂
-
2支援IP67且堅固
-
3也可選擇輕量C-mount型
高相容性,可支援不同對象

支援各機械手臂廠商
只需選擇廠商名稱,即可直接連接各家標準控制器。即使因製程不同而使用不同的機械手臂,也可以使用相同的介面來設定機械手臂視覺系統。
| 支援的機械手臂廠商 | |||||||
|---|---|---|---|---|---|---|---|
| 支援的機械手臂廠商 | ABB | ABB | DAIHEN | DENSO | EPSON | FANUC | HIRATA |
| DAIHEN | IAI | JANOME | KAWASAKI | KUKA | MITSUBISHI | NACHI | |
| DENSO | STAUBLI | SHIBAURA MACHINE | UNIVERSAL ROBOTS | YAMAHA | YASKAWA MOTOMAN | 自訂 | |
| EPSON | |||||||
| FANUC | |||||||
| HIRATA | |||||||
| IAI | |||||||
| JANOME | |||||||
| KAWASAKI | |||||||
| KUKA | |||||||
| MITSUBISHI | |||||||
| NACHI | |||||||
| STAUBLI | |||||||
| SHIBAURA MACHINE | |||||||
| UNIVERSAL ROBOTS | |||||||
| YAMAHA | |||||||
| YASKAWA MOTOMAN | |||||||
| 自訂 | |||||||
無論是誰都能迅速且確實完成啟動
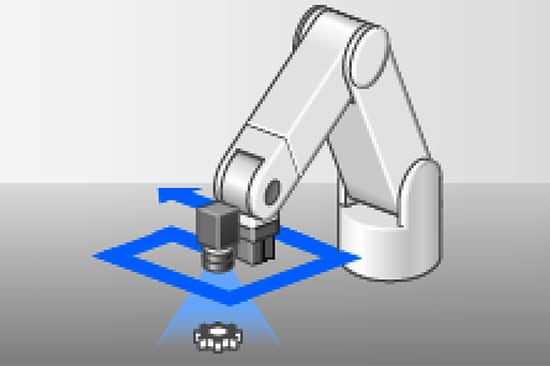
自動校正
煩瑣的校正作業只需一鍵搞定。不論由誰操作,都能以相同精度確實完成啟動。
Before

以往的問題
- 精度會依據操作者而改變
- 發生設定偏差時難以再調整
- 在交貨的客戶處,大費周章還原手臂與視覺的座標統一狀態
After
KEYENCE機械手臂視覺系統能夠解決
- 任何人操作皆可維持高精度
- 即使設定位置發生偏差亦可立即執行恢復
- 只需點一下即可簡單進行
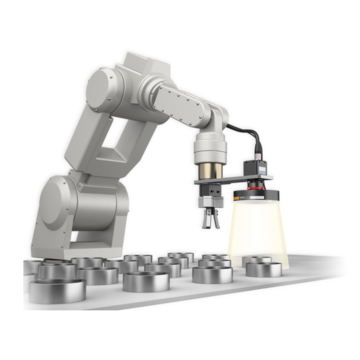
輕鬆輔助機械手臂動作
只要直覺地指定動作流程,即可自動編寫機械手臂程式。
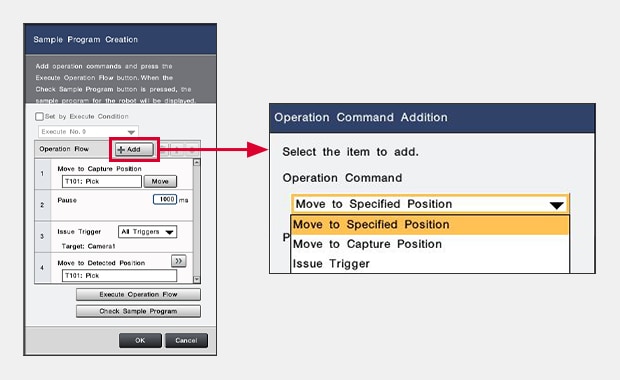
只需選擇機械手臂動作即可完成的簡單設定。
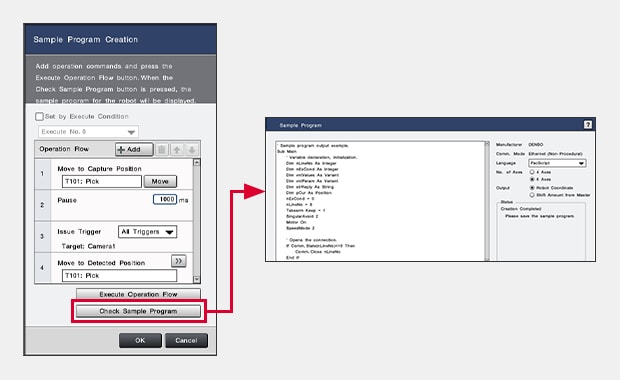
使用各機械手臂廠商的語言編寫程式。
透過強大的搜尋工具,無壓力實現速度與應對能力
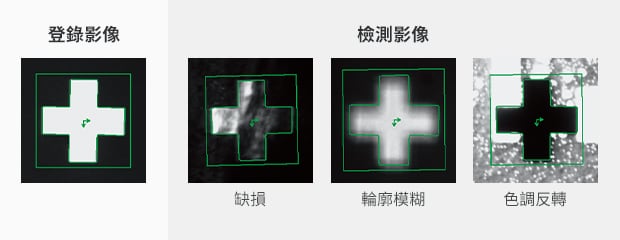
視覺系統廠商獨有的穩定位置檢測。
即使拍攝狀態不同於登錄時的狀態,仍可正確搜尋。
同時完成多項檢查
可新增字元辨識、外觀檢查及品種辨別等功能。
辨識檢查(OCR、一維/二維條碼)
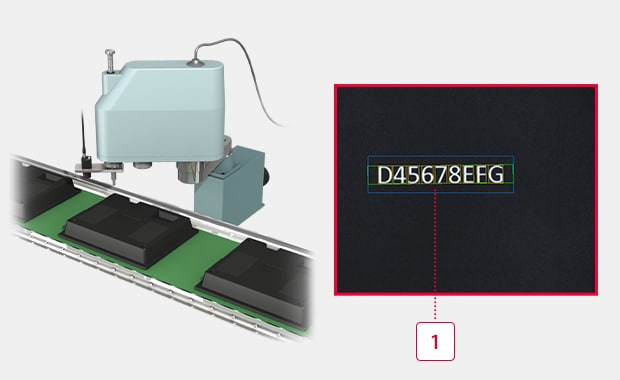
辨識位置同時讀取字元。
-
1位置辨識
外觀檢查

檢查抓取後的產品,辨別NG品。
-
1表面損傷
